《操作系统真像还原》操作系统实现——线程和锁
这篇文章写的比较乱且简略,要看的话建议跟着代码一起看。本文代码在此处
线程和进程是操作系统的重要概念。
线程和进程的区别
这似乎是一个面试中常见的问题了哈哈哈,这里我可能无法给出教科书级别的解释(实际上那也未必是最好的解释),只写一下自己的理解。
先考虑一下线程存在的意义,如果一个计算机系统是单线程的(即不能并发),显然这个机器也是可以工作的,但是每个线程在工作的时候可能会进行各种 IO 操作,此时进程会因为需要等待 IO(等待的时间的数量级可能是秒级的,相对于处理器和时钟的频率来讲非常巨大)而造成处理器的空转,这是极度浪费的。如果我们可以在等待的时间将处理器分配给别的线程,就可以大幅提高效率。又或者计算机上存在两个线程,一个需要运行数天时间,一个仅需几秒,由于前一个线程先上处理器运行,所以仅需几秒的线程就需要等待大量的时间才能执行。并发(由多线程实现)可以有效的解决这个问题。
而进程存在的意义,则主要是系统资源的隔离。一种常见的隔离方式是给每个进程分配不同的页表,这样虽然每个进程可能会有相同的虚拟地址,但是他们映射到的物理地址却是截然不同的,这样就将主存有效的隔离了开来。
有趣的是,在调度时,实际上是以线程为单位的,在此时进程实际上不再存在了。
线程的类型
根据内存管理器所处的优先级,分为两种线程,内核线程和用户态线程
- 内核线程:优点是用户使用起来方便,缺陷在于由于需要进行特权级的切换,相对比较慢
- 用户态线程:优点是速度上会快许多(节省了系统调用的开销),缺陷是由于需要用户自己管理线程的调度,增加了开发难度,一般是由一些库来进行统一管理,比如 glibc 的 pthread 等。
两种管理方式各有优劣,作为折中,现代操作系统将两者结合,在阻塞的时候使用内核线程,非阻塞时使用用户态线程。
线程的管理
主要需要:
- 线程的创建和销毁
- 线程的特权级变更
- 线程的轮询和调度
PCB
进程控制块(Process Control Block,PCB)是一种用于控制进程的结构体,相当于一个进程的身份证,我们用它也可以一起控制线程。一种简单的结构如下
typedef struct task_struct
{
uint32_t *self_kernel_stack;
enum task_status status;
uint8_t priority; /* how many ticks the thread running per round */
char name[16];
uint8_t cpu_ticks_left;
uint8_t cpu_ticks_elapsed;
struct list_elem general_tag;
struct list_elem all_list_tag;
size_t PDE_addr;
size_t canary;
}PCB;
使用 self_kernel_stack 来指向线程在内核态下使用的栈的栈顶,这样可以解决线程在特权级变更时的栈转移问题。
结构体中的 list_elem 结构体是一个双向链表,通过这个链表将所有线程的 PCB 串了起来,即可在轮询的时候进行遍历了。
cpu_ticks_left 表示当前的线程还可以运行多少个 ticks,以一个时钟中断为 1 tick。cpu_ticks_elapsed 则是线程已运行的 ticks。
用 task_status 枚举线程的状态
enum task_status
{
TASK_RUNNING,
TASK_READY,
TASK_BLOCKD,
TASK_WAITING,
TASK_HANGING,
TASK_DIED
};
轮询和调度
这里的管理使用简单的轮询机制,每次时钟中断更新当前线程的 cpu_ticks_left,并在这个线程结束时把它换下 CPU。
上下文保护
调度的过程最重要的是上下文保护,此处的调度是对同一个优先级,同一个进程的不同线程的调度,需要进行两次上下文保护
首先是中断时的上下文保护
%macro VECTOR 2 ; VECTOR INTnumber HAS(NONE)_ERROR_CODE
section .text
INTR%1Entry:
%2 ; make all kinds of INTeRrupt
; has the same stack struct
; means a int with error code, push noting
; a int without error code, push a "error code"
push ds
push es
push fs
push gs
pushad ; save the context
; send EOI(End Of Interrupt) to the 8259A
mov al,0x20 ; EOI
out 0xa0,al ; send to slave
out 0x20,al ; send to master
push %1 ; push it anyway
call [idt_table + %1 * 4] ; the the C function
jmp IntExit
section .data
dd INTR%1Entry
%endmacro
以上为中断的入口(IDT 向量表中指向的函数),这里是将线程的上下文完全保护的,所以在离开时也恢复的所有的寄存器
section .text
global IntExit
; ---------- this function mainly restored the context ----------
IntExit:
add esp,4 ; pass the int number
popad
pop gs
pop fs
pop es
pop ds ; restore the context
add esp,4 ; pass the error code
iretd
而进入中断后,对于时钟中断的中断处理函数就是我们的线程调度器
static void IntTimerHandler()
{
struct task_struct* current_thread = GetCurrentThreadPCB();
/* detect stack overflow */
ASSERT(current_thread->canary == STACK_CANARY);
current_thread->cpu_ticks_elapsed++;
ticks++;
if (current_thread->cpu_ticks_left == 0)
{
ScheduleThread();
}
else
{
current_thread->cpu_ticks_left--;
}
}
到这里,如果不需要进行线程调度,那么直接退出 IntExit 函数上,恢复线程上下文即可。
如果需要进行线程调度,就会执行 ScheduleThread() 函数
void ScheduleThread()
{
ASSERT(GetIntStatus() == INT_OFF);
struct task_struct* current_thread = GetCurrentThreadPCB();
if (current_thread->status == TASK_RUNNING)
{
ASSERT(!elem_find(&ready_thread_list, ¤t_thread->general_tag));
list_append(&ready_thread_list, ¤t_thread->general_tag);
current_thread->cpu_ticks_left = current_thread->priority;
current_thread->status = TASK_READY;
}
else
{
// noting to do for now
}
ASSERT(!list_empty(&ready_thread_list));
thread_tag = NULL;
/* get the first READY task, send it to the CPU */
thread_tag = list_pop(&ready_thread_list);
struct task_struct* next_thread = elem2entry(struct task_struct, \
general_tag, thread_tag);
next_thread->status = TASK_RUNNING;
switch_to(current_thread, next_thread);
}
前面是对双向链表的操作,需要把当前的线程,也就是将要被换下 CPU 的线程放到 ready_thread_list 的队尾,并且取出 ready_thread_list 的队头,准备进行线程的切换,这个切换函数也比较简单
[bits 32]
section .text
global switch_to
switch_to:
; callee only backup esi, edi, ebx, ebp for caller
push esi
push edi
push ebx
push ebp
mov eax,[esp + 20] ; get current_thread
mov [eax],esp ; store current stack top to self_kernel_stack
mov eax,[esp + 24] ; get next_thread
mov esp,[eax] ; get next_thread's self_kernel_stack back
pop ebp
pop ebx
pop edi
pop esi
ret
可见这里仅备份了当前线程的 esi,edi,ebx,ebp,然后更新了当前线程 PCB 的栈顶指针,并用下一个线程的 PCB 的栈顶指针更新 esp,然后也仅还原 esi,edi,ebx,ebp。这里看起来比较难以理解,好像是有问题的,但是实际上这是一个很巧妙的实现。
首先 switch_to 函数在执行了 mov esp,[eax] 后其实就已经转到了下一个线程了,因为此时已经在另一个线程的栈上了。
然后用一张图来解释
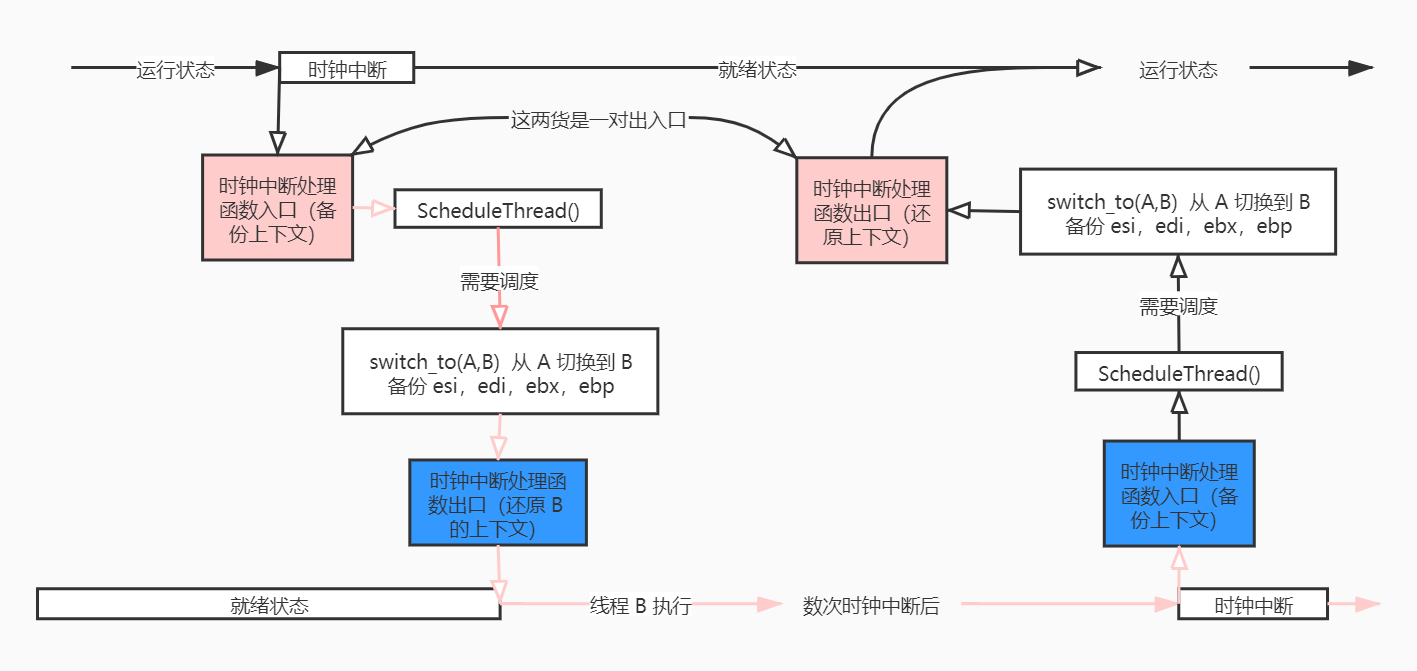
每一个被换下的线程的中断处理函数出口都是还没有被执行的,所以在切换完线程后,线程的上下文会通过未执行的中断处理函数出口来恢复。
接下来再解释 switch_to 中仅保护 esi,edi,ebx,ebp 的原因,由于这个函数实际上是由 ScheduleThread 函数调用的,根据 gcc 编译器的 ABI 约定,主调函数会自己保存处理 esi,edi,ebx,ebp 之外的寄存器,所以这里只要保存这四个寄存器就可以了。
main 函数为
#include "print.h"
#include "init.h"
#include "debug.h"
#include "memory.h"
#include "thread.h"
#include "interrupt.h"
void KThreadTest(void *arg);
int _start()
{
sys_putstr("this is kernel!\n");
char a[16];
InitAll();
ThreadStart("KThreadTest", 31, KThreadTest, "argA ");
ThreadStart("KThreadTest", 8, KThreadTest, "argB ");
EnableInt();
while(1)
{
sys_putstr("main ");
}
return 0;
}
void KThreadTest(void *arg)
{
char *para = (char *) arg;
while(1)
{
sys_putstr(arg);
}
}
执行的效果为
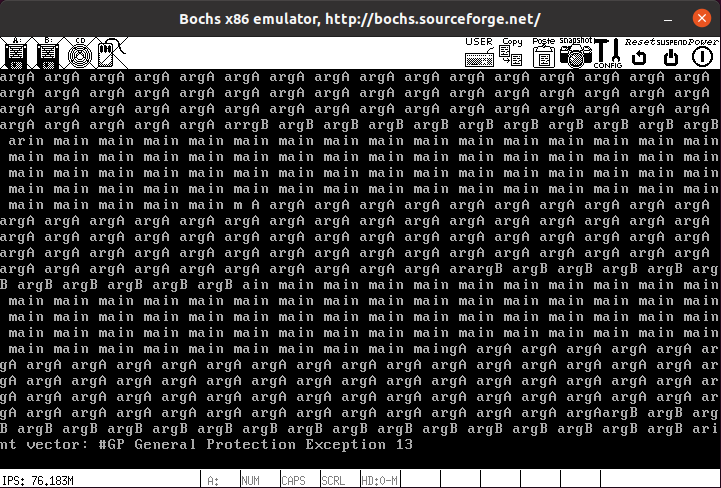
可以看到线程调度起效,特别的,出现了 GP 错误,这是输出没有加锁造成的临界区错误。
使用锁进行临界区保护
有这些概念需要过一下,很简单很好理解
- 公共资源:会被超过一个线程访问的内存资源
- 临界区:访问公共资源的代码
- 信号量:一个有初值的计数器,减到 0 时代表信号的改变(从可使用变成不可使用)
- P 操作:减小信号量
- V 操作:增加信号量
- 锁:维护信号量和锁的持有者、等待者的数据结果
- 互斥锁:信号量初值为 1 的锁(即锁最多只有一个持有者)
- 阻塞:线程由于各种原因(此处为取锁失败)将自己阻塞,注意这是线程自己的行为,一个线程不能被别的线程阻塞;对应的别的线程可以恢复被阻塞的线程,此处使用锁的持有者在释放锁时恢复的。
之前的输出中出现 GP 错误(GP 的一种情况是非法内存访问)就是典型的临界区错误,考虑这样一个情况,线程 A 开启了显卡的光标设置端口,在写入光标值低 8 位前一刻由于时间片耗尽,被换下处理器,线程 B 也开启显卡的光标设置端口,在写入光标值高 8 位前一刻由于时间片耗尽,A 又被换上处理器,这样低 8 位值就会被写到 8 八位上,造成光标值更新错误。
一种简单粗暴的解决方法是在所有的临界区操作前关中断,操作后开终端,这样是有效的,但是实际上违背了多线程的充分利用系统资源的目标,因为许多临界区操作都是设备 IO 操作,如果暴力的开关中断,那么在此线程等待设备 IO 的时候别的线程就不能执行,CPU 仍然是空转。
所以就可以引入锁,首先解决输出临界区的问题,由于只有一个输出设备,所以可以使用互斥锁。
取得锁的操作为
void sys_lock_lock(struct lock *plock)
{
if (plock->holder != GetCurrentThreadPCB())
{
SemaphoreDown(&plock->semaphore);
plock->holder = GetCurrentThreadPCB();
ASSERT(plock->holder_repeat_request_sum == 0);
plock->holder_repeat_request_sum = 1;
}
else
{
plock->holder_repeat_request_sum++;
}
}
函数 SemaphoreDown 为 P 操作,若信号量为 1,代表没有线程持有该锁,将信号量减 1 并返回,获得锁,否则阻塞自己
void SemaphoreDown(struct semaphore* psema)
{
enum int_status old_int_statu = DisableInt();
PCB* current_thread = GetCurrentThreadPCB();
while(psema->value == 0)
{
ASSERT(!elem_find(&psema->waiting_thread_list, ¤t_thread->general_tag));
if (elem_find(&psema->waiting_thread_list, ¤t_thread->general_tag))
{
PANIC("thread already in wating list");
}
list_append(&psema->waiting_thread_list, ¤t_thread->general_tag);
BlockThread(TASK_BLOCKD);
}
psema->value--;
SetIntStatus(old_int_statu);
}
类似的有释放锁的操作
void sys_lock_unlock(struct lock* plock)
{
ASSERT(plock->holder == GetCurrentThreadPCB());
if (plock->holder_repeat_request_sum > 1)
{
plock->holder_repeat_request_sum--;
return;
}
ASSERT(plock->holder_repeat_request_sum == 1)
plock->holder_repeat_request_sum = 0;
plock->holder = NULL;
SemaphoreUp(&plock->semaphore);
}
void SemaphoreUp(struct semaphore* psema)
{
enum int_status old_int_statu = DisableInt();
if (!list_empty(&psema->waiting_thread_list))
{
PCB* thread_blocked = elem2entry(PCB, general_tag, \
list_pop(&psema->waiting_thread_list));
UnblockThread(thread_blocked);
}
psema->value++;
SetIntStatus(old_int_statu);
}
新增一个控制台设备,用于输出
#include "console.h"
#include "print.h"
#include "stdint.h"
#include "sync.h"
static struct lock console_lock;
void ConsoleInit()
{
LockInit(&console_lock);
}
void ConsoleAcquire()
{
sys_lock_lock(&console_lock);
}
void ConsoleRelease()
{
sys_lock_unlock(&console_lock);
}
int console_putstr(char *str)
{
ConsoleAcquire();
int output_num = sys_putstr(str);
ConsoleRelease();
return output_num;
}
void console_putchar(char char_asi)
{
ConsoleAcquire();
sys_putchar(char_asi);
ConsoleRelease();
}
int console_putint(int num)
{
ConsoleAcquire();
int output_num = sys_putint(num);
ConsoleRelease();
return output_num;
}
修改 main 为
#include "print.h"
#include "init.h"
#include "debug.h"
#include "memory.h"
#include "thread.h"
#include "interrupt.h"
#include "console.h"
void KThreadTest(void *arg);
int _start()
{
sys_putstr("this is kernel!\n");
InitAll();
ThreadStart("KThreadTestA", 31, KThreadTest, "argA ");
ThreadStart("KThreadTestB", 8, KThreadTest, "argB ");
EnableInt();
while(1)
{
console_putstr("main ");
}
return 0;
}
void KThreadTest(void *arg)
{
char *para = (char *) arg;
while(1)
{
console_putstr(arg);
}
}
后就可以正常输出了。